Master Driver¶
The Master Driver agent is a special purpose agent a user can install on the platform to manage communication of the platform with devices. The Master driver features a number of endpoints for collecting data and sending control signals using the message bus and automatically publishes data to the bus on a specified interval.
How does it work?¶
The Master Driver creates a number of driver instances based on the contents of its config store; for each combination of driver configuration, registry configuration and other referenced config files, a driver instance is created by the Master Driver. When configuration files are removed, the corresponding driver instance is removed by the Master Driver.
Drivers are special-purpose agents for device communication, and unlike most agents, run as separate threads under the Master Driver (typically agents are spawned as their own process). While running, the driver periodically “scrapes” device data and publishes the scrape to the message bus, as well as handling ad-hoc data collection and control signalling commands issued from the Master Driver. The actual commands are issued to devices by the driver’s “Interface” class.
An Interface class is a Python class which serves as the interface between the driver and the device. The Interface does this by implementing a set of well-defined actions using the communication paradigms and protocols used by the device. For devices such as BACnet and Modbus devices, interfaces wrap certain protocol functions in Python code to be used by the driver. In other cases, interfaces interact with web-API’s, etc.
Device/Driver Communication¶
The below diagram demonstrates driver communication on the platform in a typical case.
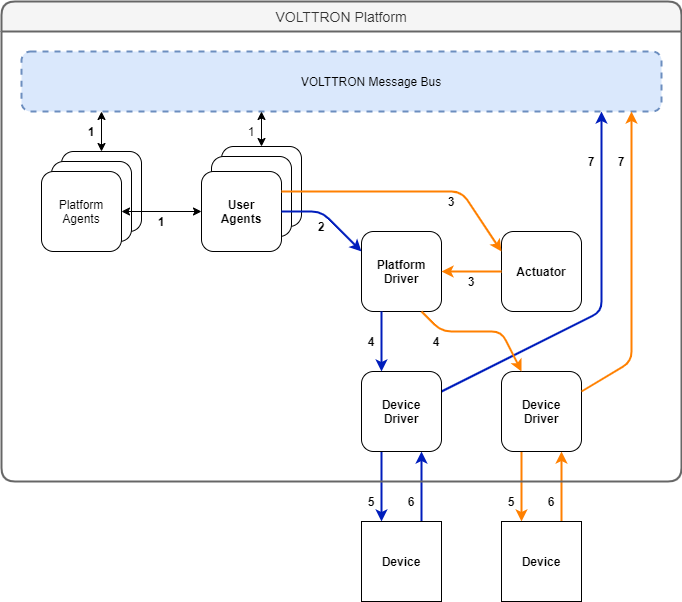
Communication occurs using the following steps:
- Platform agents and the user’s agents communicate between themselves and the message bus using publish/subscribe or JSON-RPC
- The user’s agent sends a JSON-RPC request to the Platform Driver to get_point
- And/Or the user’s agent sends a JSON-RPC request to the Actuator to set_point
- The Platform Driver forwards the request to the driver instance specified in the request
- The device driver communicates with the end device
- The end device returns a response to the driver indicating its current status
- The driver publishes the device’s response to the message bus using a publish
Installation¶
The Master Driver must first be configured, similarly to other agents.
Then, the user must add driver configurations, registry configurations, and any other referenced configurations to the config store if they do not already exist.
Adding Device Configurations to the Configuration Store¶
Configurations are added to the Configuration Store using the command line:
volttron-ctl config store platform.driver <name> <file name> <file type>
- name - The name used to refer to the file from the store.
- file name - A file containing the contents of the configuration.
- file type -
--raw,--json, or--csv. Indicates the type of the file. Defaults to--json.
The main configuration must have the name config
Device configuration but not registry configurations must have a name prefixed with devices/. Scripts that
automate the process will prefix registry configurations with registry_configs/, but that is not a requirement for
registry files.
The name of the device’s configuration in the store is used to create the topic used to reference the device. For instance, a configuration named devices/PNNL/ISB1/vav1 will publish scrape results to devices/PNNL/ISB1/vav1 and is accessible with the Actuator Agent via PNNL/ISB1/vav1.
The name of a registry configuration must match the name used to refer to it in the driver configuration. The reference is not case sensitive.
If the Master Driver Agent is running any changes to the configuration store will immediately affect the running devices according to the changes.
Example¶
Consider the following three configuration files: A master driver configuration called master-driver.agent, a Modbus device configuration file called modbus_driver.config and corresponding Modbus registry configuration file called modbus_registry.csv
To store the master driver configuration run the command:
volttron-ctl config store platform.driver config master-driver.agent
To store the registry configuration run the command (note the --csv option):
volttron-ctl config store platform.driver registry_configs/modbus_registry.csv modbus_registry.csv --csv
Note
The registry_configs/modbus_registry.csv argument in the above command must match the reference to the registry_config found in modbus_driver.config.
To store the driver configuration run the command:
volttron-ctl config store platform.driver devices/my_campus/my_building/my_device modbus_config.config
Converting Old Style Configuration¶
The new Master Driver no longer supports the old style of device configuration. The old device_list setting is ignored.
To simplify updating to the new format scripts/update_master_driver_config.py is provide to automatically update to the new configuration format.
With the platform running run:
python scripts/update_master_driver_config.py <old configuration> <output>
old_configuration`` is the main configuration file in the old format. The script automatically modifies the driver files to create references to CSV files and adds the CSV files with the appropriate name.
output is the target output directory.
If the --keep-old switch is used the old configurations in the output directory (if any) will not be deleted before
new configurations are created. Matching names will still be overwritten.
The output from scripts/update_master_driver_config.py can be automatically added to the configuration store for the Master Driver agent with scripts/install_master_driver_configs.py.
Creating and naming configuration files in the form needed by scripts/install_master_driver_configs.py can speed up
the process of changing and updating a large number of configurations. See the --help message for
scripts/install_master_driver_configs.py for more details.
Usage¶
After installing the Master Driver and loading driver configs into the config store, the installed drivers begin polling and JSON-RPC endpoints become usable.
Polling¶
Once running, the Master Driver will spawn drivers using the driver_type parameter of the driver configuration and periodically poll devices for all point data specified in the registry configuration (at the interval specified by the interval parameter of the driver configuration).
Using the default configuration provided in the repository, device data collected during a “scrape all” is published to the depth_first_all topic for the device.
For more information on device data topics, please view the device state publish docs.
JSON-RPC Endpoints¶
get_point - Returns the value of specified device set point
- Parameters
- path - device topic string (typical format is devices/campus/building/device)
- point_name - name of device point from registry configuration file
- set_point - Set value on specified device set point. If global override is condition is set, raise OverrideError
exception.
- Parameters
- path - device topic string (typical format is devices/campus/building/device)
- point_name - name of device point from registry configuration file
- value - desired value to set for point on device
Warning
It is not recommended to call the set_point method directly. It is recommended to instead use the Actuator agent to set points on a device, using its scheduling capability.
scrape_all - Returns values for all set points on the specified device.
- Parameters
- path - device topic string (typical format is devices/campus/building/device)
get_multiple_points - return values corresponding to multiple points on the same device
- Parameters
- path - device topic string (typical format is devices/campus/building/device)
- point_names - iterable of device point names from registry configuration file
- set_multiple_points - Set values on multiple set points at once. If global override is condition is set, raise
OverrideError exception.
- Parameters
- path - device topic string (typical format is devices/campus/building/device)
- point_names_value - list of tuples consisting of (point_name, value) pairs for setting a series of points
heart_beat - Send a heartbeat/keep-alive signal to all devices configured for Master Driver
- revert_point - Revert the set point of a device to its default state/value. If global override is condition is
set, raise OverrideError exception.
- Parameters
- path - device topic string (typical format is devices/campus/building/device)
- point_name - name of device point from registry configuration file
- revert_device - Revert all the set point values of the device to default state/values. If global override is
condition is set, raise OverrideError exception.
- Parameters
- path - device topic string (typical format is devices/campus/building/device)
- set_override_on - Turn on override condition on all the devices matching the specified pattern (
-
- Parameters
- pattern - Override pattern to be applied. For example,
- If pattern is campus/building1/* - Override condition is applied for all the devices under campus/building1/.
- If pattern is campus/building1/ahu1 - Override condition is applied for only campus/building1/ahu1 The pattern matching is based on bash style filename matching semantics.
- duration - Duration in seconds for the override condition to be set on the device (default 0.0, duration <= 0.0 imply indefinite duration)
- failsafe_revert - Flag to indicate if all the devices falling under the override condition must to be set to its default state/value immediately.
- staggered_revert -
set_override_off - Turn off override condition on all the devices matching the pattern.
- Parameters
- pattern - device topic pattern for devices on which the override condition should be removed.
get_override_devices - Get a list of all the devices with override condition.
clear_overrides - Turn off override condition for all points on all devices.
get_override_patterns - Get a list of all override condition patterns currently set.